双5G边缘计算网关/工业CPE-AR7091G/GK
AR7091G/GK——基于5G/4G/3G/2G、WiFi、虚拟专网等技术开发的工业物联网边缘网关/CPE。产品采用高性能的工业级32位通信处理器和工业级无线模块,以嵌入式操作系统为软件支撑平台,可同时连接串口设备、以太网设备和 WiFi 设备, 支持内部Flash和外扩Micro SD卡存储数据,能满足工业现场通信的需求。

 上海EP电力展进行时:爱陆通N3-3K16展位精彩持续,诚···
上海EP电力展进行时:爱陆通N3-3K16展位精彩持续,诚···
 IEC61850协议应用智能电网通信
IEC61850协议应用智能电网通信
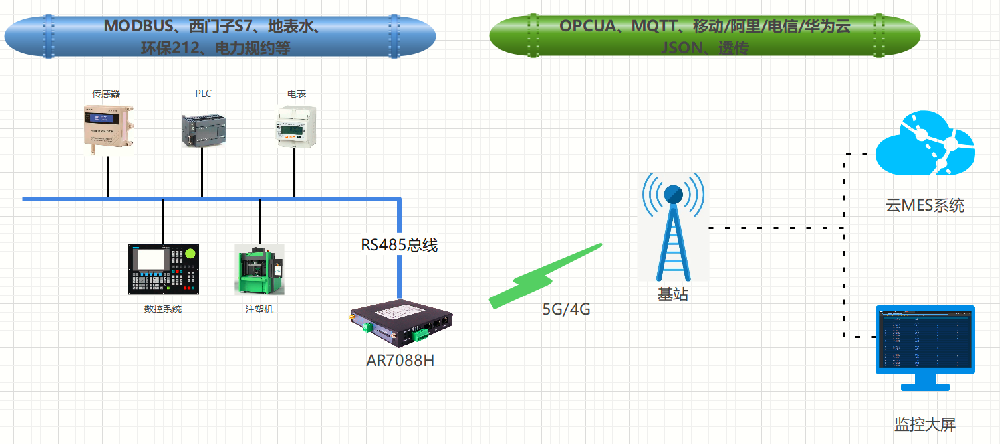
 集中式DTU通信解决方案-智能配网
集中式DTU通信解决方案-智能配网
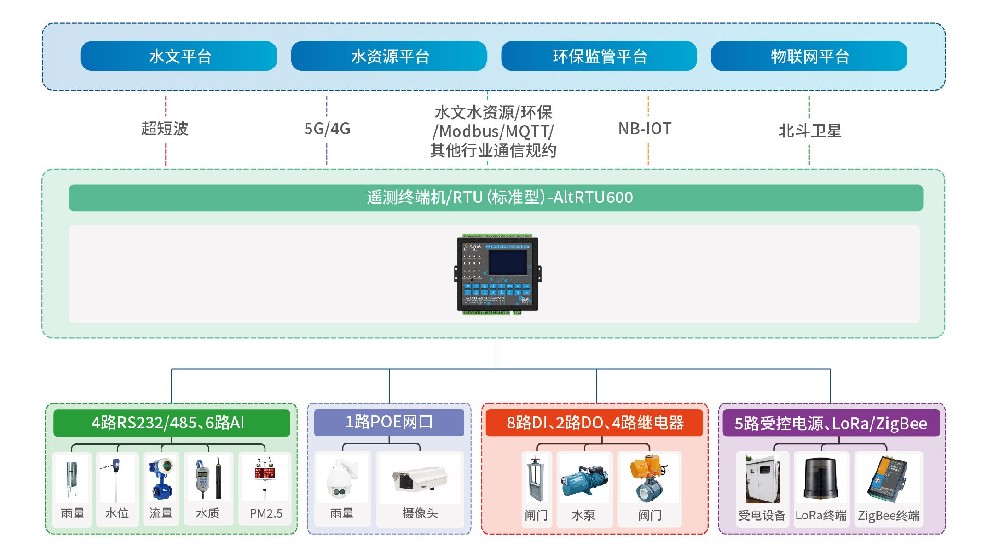
 5G视频RTU 视频数采仪 数据采集传输仪
5G视频RTU 视频数采仪 数据采集传输仪
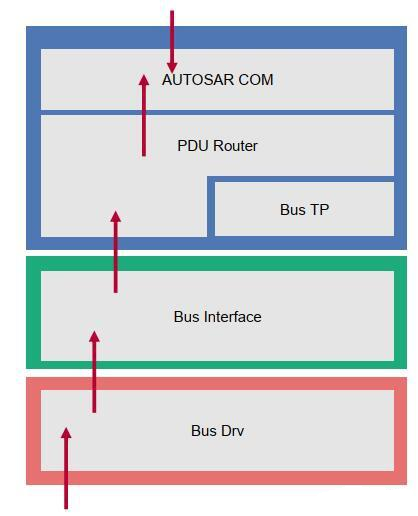
CAN总线数据接收示意(图源:Vector)
CAN是一种多主控、同步串行通信协议,专为嵌入式系统之间的数据交换设计。它允许多个节点通过一个双线(CAN_H和CAN_L)总线同时通信,这种设计不仅简化了布线,还避免了传统通信方式中常见的冲突问题。
快盈lV高可靠性:CAN采用差分信号传输,有效抑制了共模干扰,同时结合CRC(循环冗余校验)和错误计数器等机制,确保数据传输的准确性。
实时性:CAN协议通过独特的仲裁机制,允许具有高优先级的消息优先传输,满足实时应用的需求。
灵活性:CAN总线可以连接多个节点,每个节点都可以作为发送者或接收者,且节点之间无需主从关系,提高了系统的灵活性。
快盈lV成本效益:CAN的硬件需求较低,布线简单,适用于大规模应用,降低了整体成本。
快盈lVCAN协议定义了四种帧类型:数据帧、远程帧、错误帧和过载帧。其中,数据帧是最常用的,用于实际的数据传输。
数据帧的结构包括起始位(SOF)、标识符(Identifier)、控制字段(Control Field)、数据字段(Data Field)、CRC字段(CRC Field)、ACK字段(Acknowledge Field)和结束位(EOF)。其中,标识符用于表示消息的优先级和内容,标准帧为11位,扩展帧为29位;控制字段包含数据长度码(DLC),指示数据字段的字节数;数据字段最多可包含8字节的数据。
CAN总线采用非破坏性仲裁机制解决总线访问冲突。节点在发送数据前,首先监听总线状态。当多个节点同时发送数据时,根据标识符的优先级进行仲裁,优先级高的节点继续发送,而优先级低的节点则暂停发送,等待下一次总线空闲。这种机制确保了高优先级消息的及时传输。
CAN协议具有完善的错误处理机制,包括位错误、填充错误、CRC错误、格式错误和确认错误等。当节点检测到错误时,会立即发送错误帧,并重传数据。错误计数器用于跟踪节点的错误状态,当计数器超出特定阈值时,节点进入“总线关闭”状态,停止通信,防止影响总线上的其他节点。
快盈lVCAN通讯在汽车电子系统中发挥着至关重要的作用。从发动机控制单元(ECU)到防抱死制动系统(ABS),再到车身控制模块(BCM),CAN总线将这些复杂的电子系统紧密连接在一起,实现了高效、准确的数据传输和控制。
在工业自动化领域,CAN协议被广泛应用于机器间的数据交换和控制。基于CAN的协议如CANopen和DeviceNet,为工业设备的网络化和模块化控制提供了有力支持。这些协议使得不同厂商的设备能够无缝集成,提高了生产效率和灵活性。
快盈lV现代医疗设备也广泛采用CAN协议进行数据传输和设备控制。手术机器人、病人监护仪和成像设备等,都依赖于CAN总线实现高效、安全和实时的医疗服务。CAN的高可靠性和实时性确保了医疗设备的稳定性和准确性。
实现CAN通讯需要特定的硬件支持,包括CAN控制器和CAN收发器。常见的CAN控制器芯片如MCP2515和TJA1050等,它们负责处理CAN协议的各个层次。CAN收发器则负责将CAN控制器输出的数字信号转换为适合总线传输的差分信号。
CAN通讯的软件实现包括配置CAN控制器、初始化CAN总线、发送和接收数据帧等步骤。常用的开发环境如Arduino、STM32和Microchip的MPLAB等,提供了丰富的库和示例代码,帮助开发者快速上手。
在STM32微控制器上实现CAN通讯,需要配置外设时钟、CAN引脚、CAN外设和过滤器等。通过HAL库提供的API函数,可以方便地实现CAN数据的发送和接收。
在CAN通讯的开发过程中,调试工具如CAN分析仪和示波器是必不可少的。CAN分析仪可以实时监控总线上的数据帧,帮助开发者分析和解决通信问题。示波器则用于观察总线上的信号波形,确保信号的完整性和稳定性。